
Onze Grijper
Het Proces
Eerste ideeën en schetsen
Na het opstellen van het programma van eisen en wensen konden we de eerste ideeën bedenken en schetsen

Ons morfologisch schema
Morfologisch Schema
Algauw kwamen we erachter dat ons product waarschijnlijk uit 3 onderdelen zou bestaan. De arm, de grijper en het rotatiemechanismen. Onze eerste ideeën hebben we toen opgesplitst in deze 3 onderdelen. Alle ideeën hebben we toen in een morfologisch schema gezet. Hier mee kun je goed zien wat voor opties we hebben. Onze volgende stap was het kiezen van drie concepten. Door het morfologisch schema te gebruiken kun je uit elke 3 categorieën een idee kiezen en die bij elkaar voegen en dan heb je een concept. Wie hebben toen de beste 3 concepten gekozen. En die concepten verder uit gewerkt.
Programma van eisen en wensen
Als je begint aan het ontwerpen van iets is het handig om eerst programma van eisen en potentiële wensen te maken. De eisen aan het product zijn dingen waar het sowieso aan moet voldoen. Bij onze project waren sommige eisen al opgezet, zoals dat de appel heel moest blijven. Sommige regels van het project zijn ook eisen zoals dat de grijper in de begin en eindstand niet boven hetzelfde vlak mag zijn als de appel. De wensen zijn dingen waar het je graag wilt dat het product aan voldoet maar niet verplicht zijn. In ons geval wouden we de kosten relatief laag houden. En het moest er degelijk en stevig uit zien, dus we probeerden materialen zoals tiewraps en ducttape te vermijden.
Programma van eisen
-
Binnen 2 minuten kunnen opbouwen en afbouwen.
-
Appel mag geen beschadigingen bevatten na afloop van de verplaatsing.
-
Appel moet in het midden van het kruis met een marge van 2 cm.
-
Appel moet 16 mm omhoog om op het plateau aan de andere kant te komen.
-
Het mechanisme mag niet starten en eindigen boven het platform waar de appel ligt.
Programma van wensen
-
Degelijk en stevig eruitzien.
-
Maximaal 70 euro uitgeven.


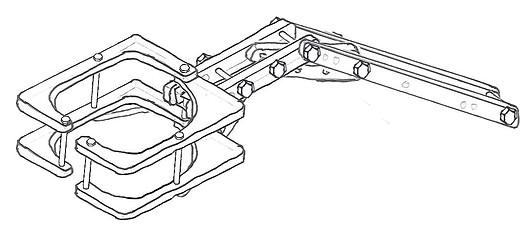
Ons ontwerp
Hoe het werkt
Het ontwerp bestaat uit een arm met een hoek erin voor extra stevigheid. Omdat we de arm natuurlijk wel moesten kunnen draaien hebben wij voor een systeem gekozen, waarbij de arm aan een loszittende as vast zit die wordt aangestuurd en gedraaid door 1 van de drie actuatoren. Voor de grijper hebben we erg lang 2 ideeën gehad die naar onze inzichten allebei veel potentie hadden. Namelijk de kom en de grijper zoals we die nu hebben gemaakt met elastieken. Eén van de eisen was dat de grijper appels van verschillende groottes moest kunnen pakken. Wij waren bang dat bij de kom dit toch niet zo soepel zou verlopen en zo zijn we op onze uiteindelijke grijper gekomen. Toen we deze eenmaal hadden gekozen, waren we zeker nog niet klaar. Gaandeweg is er nog een hoop aan de grijper veranderd, omdat je er dan toch achter komt dat er nog iets verbeterd kan worden. Zodat we uiteindelijk tot het beste resultaat zijn gekomen.

Waarom we deze hebben gekozen
Na een hoop brainstormen hebben wij drie concepten verder uitgewerkt, zoals die ook zijn weergegeven in de spuugmodellen en de isometrische tekeningen. Deze modellen zijn puur voortgekomen uit het theoretisch bedenken van hoe we de appel op een zo efficiënt mogelijke manier gingen verplaatsen. Na de drie concepten bedacht te hebben, gingen we per concept kijken wat er goed of slecht aan was. Daarnaast hebben we gekeken naar onder andere de kans van slagen en de betrouwbaarheid. Uiteindelijk hebben wij gekozen voor een mix van 2 van onze proefmodellen, concept 2 en 3, aan beide concepten zaten namelijk voor- en nadelen. De glijbaan was een van onze proefconcepten, deze hebben wij uiteindelijk niet verder uitgewerkt omdat wij er als groep achter kwamen dat er helaas te veel hekelpunten aan zaten. Aangezien we natuurlijk maar een beperkte tijd hadden, zijn we gaan kijken naar een zo praktisch mogelijke oplossing. De glijbaan voldeed niet aan deze eis. Vervolgens hadden we nog een proefconcept met een uitschuifarm met een schaarmechanisme. Dit mechanisme zat al vanaf het begin af aan in ons hoofd, maar deze hebben wij uiteindelijk ook niet gekozen omdat er nog een praktische en simpelere oplossing was.

Het Team
Wij zijn zeven eerstejaars studenten werktuigbouwkunde aan de Technische Universiteit Delft en wij vormen samen WB groep 80.
Onze groep bestaat uit:
Jasper Ros
Bouwe van der Poel
Jeroen de Vries
Mart Reumer
Tanu Guluma
Florian Faber
Thomas Raatjes


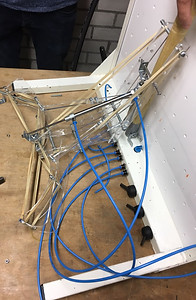
Testen van de grijper
Enkele video's van de grijper in actie
We hebben een aantal keren de mogelijkheid gekregen om de AWS te betreden. Daar konden we met de actuatoren aan de slag, en kijken hoe ons ontwerp in de realiteit werkte. Dit leverde soms problemen op, dat we erachter kwamen dat iets niet werkte of niet kon passen. Dat is natuurlijk ook waar dit bedoeld voor is. Hiermee hebben we fouten uit ons systeem kunnen halen. Zo hebben we op een gegeven moment besloten om de grijper op de kop te zetten. Door middel hiervan konden we makkelijker de hoogte van het schot overbruggen en hebben we de grijper horizontaal kunnen krijgen. We kampten namelijk met het probleem dat de grijper onder een hoek de appel benaderde en daardoor heel moeilijk de appel kon pakken. Ook hebben we nog niet alles kunnen testen door gebrek aan tijd. Omdat we alles niet perfect uitgedacht hadden moesten we relatief veel nog op het moment zelf verzinnen of beslissen. Dit heeft uiteraard kostbare tijd gekost en misschien ook de degelijkheid van het ontwerp ondermijnd, maar vooralsnog zijn we eruit gekomen.
De grijper



Eindontwerp zonder actuatoren en enkele elastieken
Het Bouwproces
Lasersnijbestand
Toen ons concept eenmaal was uitgewerkt werd het tijd om onze grijper te gaan bouwen. We hadden de mogelijkheid om een PMMA-plaat te laten lasersnijden, deze plaat was 490 mm bij 240 mm en 5 mm dik. Om de lasersnijder aan te sturen hadden we een lasersnijbestand nodig. Deze hebben we gemaakt in Solidworks™. De meeste onderdelen van ons ontwerp konden van een plaat PMMA worden gemaakt. De andere onderdelen hebben we ergens anders van gemaakt. Toen we alle essentiële onderdelen in ons lasersnijbestand hadden gezet bleek dat er wat extra ruimte over was. Die extra ruimte hebben we gevuld met reserveonderdelen.

Het lasersnijbestand
Materialen
Het proces
Taakverdeling
Samenwerking
Om een ontwerp van papier uiteindelijk op de tafel te hebben staan, zijn er een aantal dingen waarop gelet moet worden, waaronder het materiaal: Je wilt iets wat stevigheid biedt, niet te zwaar is en tegelijkertijd er degelijk uitziet. Je moet dus voor elk onderdeel van je ontwerp gaan nadenken of er veel kracht op komt te staan en hoe je ze aan elkaar wil vastmaken. Zo krijg je een inzicht over wat voor soort materialen je wil en kan gaan gebruiken.
Voor onze opdracht hebben we een aantal materialen gekregen:
-
Een perspex-plaat.
-
Bouten en moeren, maat M4.
-
Bouten en moeren, maat M6.
Zo kregen we tijdens een aantal momenten drie actuatoren te leen om ons ontwerp mee te testen. Voor ons ontwerp was dit nog niet genoeg, we hebben zelf namelijk nog aangeschaft:
-
Elastieken.
-
Een houten bezemsteel.
-
Een houten balk
-
90 graden hoekstukken
-
Extra bouten en moeren, maten M4 en M6.
-
Schroefdraad, eveneens in de maten M4 en M6.
Wij hebben voor deze materialen gekozen omdat ze redelijk makkelijk te bewerken waren zonder geavanceerde machines en we het naar onze eigen hand konden zetten zonder dat we iemand het voor ons moesten laten doen. Ook waren ze redelijk goedkoop en erg sterk voor het gewicht wat we moeten verplaatsen.
Om zo’n ontwerp uiteindelijk in ‘levende lijve’ op tafel te hebben staan, moet je gestructureerd te werk gaan. Men kan niet met z’n allen werken aan een onderdeel tegelijk, daar is een taakverdeling voor nodig. Wij hebben de taken eerlijk verdeeld, zodat iedereen wist wat hij moest doen en als je klaar was met je deel, je door kon gaan met iets anders of een collega kon helpen als hij er niet uitkwam. Ontzettend uitgebreide taakverdeling hebben we niet omdat er vaak maar een of weinig dingen waren om aan te werken. Ook hebben we ontzettend veel verschillende dingen gedaan, en waarbij ook niet altijd dezelfde persoon alleen aan een ding werkte, maar waar we ook weleens wisselen van taak. Dit brengt me gelijk op mijn volgende onderwerp.
Bij het bouwen van deze grijper was het ongelofelijk belangrijk om goed samen te werken. Ten eerste is het noodzakelijk om te communiceren met elkaar, zodat er geen misverstanden plaatsvinden, straks heb je namelijk een enorme fout aan je broek hangen en is het niet reparabel omdat je bijvoorbeeld al ergens een gat in hebt geboord. Ook is het belangrijk elkaar te helpen waar het nodig is, mag het zijn hoe je een moer om een bout schroeft of hoe je met Solidworks™ omgaat, het is allemaal even noodzakelijk om met elkaar succesvol je ontwerp te realiseren.
Als reflectie op de samenwerking: we vinden dat de samenwerking in onze groep goed verloopt, we maken goede afspraken met elkaar, vullen elkaar aan waar nodig en hebben een prettige sfeer. Af en toe was de communicatie niet goed genoeg en kwamen hier door misverstanden wat ons waarschijnlijk veel tijd heeft gekost.
Toen we eenmaal onze perspex-plaat uitgelaserd hadden gekregen, konden we aan de slag met bouwen. We pakten onze tekeningen erbij en begonnen te passen en te draaien, te schroeven en te boren. We gingen eerst aan de slag met alle aparte onderdelen in elkaar zetten; de arm waar de grijper aan vastzit, de grijper zelf, de bevestiging aan de muur en wat overige benodigdheden. Al snel kwamen we erachter dat we tegen een aantal problemen aan zouden lopen. We hadden nog niet echt goed nagedacht over hoe we de verschillende onderdelen aan elkaar zouden maken. We hadden er wel ideeën erover maar we hadden ze niet uitgewerkt. Dus dan gingen we even bij elkaar zitten om een oplossing te vinden voor dit probleem, en kwamen we er samen uit na overleg of een discussie waarom welk idee beter was. We zijn dus een aantal maal tegen een probleem aangelopen. Door trial & error zijn we er meestal toch uitgekomen waardoor we nu ons eindproduct op de tafel hebben staan.

Tussenontwerp
Problemen en oplossing
Als je een product voor het eerst bouwt kom je gegarandeerd problemen tegen en probeer je die op te lossen. Hier zullen we problemen bespreken die we zijn tegen gekomen en onze oplossingen.
Probleem:
Toen we de grijper in elkaar hadden gezet, merkte we op dat de manier waarop de grijper aan de grijparm vast was gezet was niet echt stabiel. De actuator duwde naar de appel toe en duwde op die manier de grijper open, maar de grijper zelf kon niet goed aan de grijparm vast worden gemaakt vanwege de actuator.
Oplossing:
We hebben de actuator die de grijper opent en sluit omgedraaid, zodat de actuator weg duwt van de appel en op die manier de grijper open trekt in plaats van open duwt. Op die manier konden we de grijper vastmaken aan de grijparm.
Probleem:
Toen we de grijper in elkaar hadden gezet merkte we op dat het de appel niet zo goed kon oppakken als we hadden gedacht. De grijper was schuin, en we dachten dat dit niet een groot probleem zou zijn, maar toen we de grijper hadden getest, kwamen we tot de conclusie dat het met heel veel moeite een kleine appel kon oppakken.
Oplossing:
We hadden dit probleem eerst opgelost door de grijper minder schuin te maken, maar toen realiseerden we dat als we de hele grijparm op de kop zouden zetten. Dan zal de grijper niet meer schuin zijn en de hele arm zou ook beter over de muur kunnen.
Probleem:
De grijper was redelijk zwaar en omdat de grote actuator dicht bij as geplaaatst moest worden kon de actuator maar een klein moment uitoefenen. zeker de eerste paar graden had de actuator moeite mee.
Oplossing:
Om de actuator te helpen hebben we elastieken aan de as en aan de grijper vast gemaakt hier door kon de actuator de arm wel omhoog krijgen.

Grijper zonder actuatoren
Introductie
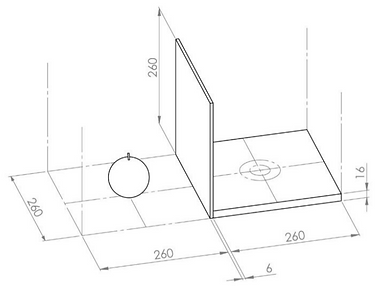
De Opdracht
Ieder jaar begint de studie werktuigbouwkunde met een ontwerpproject, naast statica en lineaire algebra. Dit project voer je over 8 weken uit samen met je groepje. Op deze website laten wij niet alleen het eindproduct zien, maar ook het gehele proces. Dat wil zeggen: hoe we het op het uiteindelijke ontwerp zijn gekomen en alle stappen onderweg en waarom we deze hebben gekozen, de andere concepten die wij bedacht hebben en het hele bouw en testproces.
Dit jaar was de opdracht een grijparm te maken die in staat was om een appel op te pakken, deze voorbij een 26 centimeter hoog muurtje kon verplaatsen, en aan de andere kant op een plateau neer leggen. Aan de andere kant van het muurtje lag een plankje van 26 x 26 cm met een hoogte van 16 mm. Om deze grijper te kunnen bewegen kregen wij beschikking tot drie pneumatische actuatoren, twee kleine en één grote. Deze actuatoren hebben een arm die 100 mm kan uitschuiven en ze werken op perslucht. Als materiaal hadden wij een plaat PMMA (perspex) van 490 x 240 x 5 mm tot onze beschikking. Halverwege het proces moesten wij een lasersnijbestand bestand inleveren met de onderdelen van onze grijper, zodat een lasersnijder deze onderdelen uit de plaat PMMA kon snijden. Daarnaast kregen wij ook M4x16, M4x30, M6x20 en M6x40 bouten en M4 en M6 moeren tot onze beschikking. Wilden wij nog andere materialen gebruiken dan moesten wij dat zelf regelen.
Uiteraard moest de grijper aan enkele voorwaarden voldoen.
• De grijper moet de appel kunnen oppakken, verplaatsen en weer neerleggen.
• De appel mag niet beschadigd worden.
• De appel moet zo dicht mogelijk bij het midden van het plateau worden neergelegd.
• De grijper mag zich in beginstand niet boven het vierkant waar de appel ligt bevinden, en in de eindstand niet boven het plateau waar de appel op ligt.
Tijdens dit project stonden wij er niet geheel alleen voor. Naast dat wij een hulpmentor hadden, aan wie wij wat konden vragen als wij ergens mee zaten, kwam de vakdocent elke week langs en hadden wij elke woensdagochtend een college. Tijdens deze colleges leerden wij hoe we het project het beste aan konden pakken, en daarnaast ook enkele vaardigheden die ons hielpen bij het project. Wij hebben bijvoorbeeld geleerd dat we het beste een beoordelingsschema en een morfologisch schema konden opstellen. Deze twee schema’s staan ook beide op deze website.
Elke dinsdag- en vrijdagmorgen was er van 08:45 tot 12:30 een projecttafel gereserveerd op de faculteit 3mE. Dit kwam erg van pas en hier hebben wij dan ook elke keer gebruik van gemaakt. Daarnaast waren wij enkele keren in de Assemblage Werkplaats Studenten (AWS) ingeroosterd, waar wij de actuatoren konden testen en ons ontwerp in elkaar konden zetten en testen.
Werkomgeving
Nu hebben we drie concepten maar moeten nog beslissen welke we gaan kiezen. Hiervoor hebben we een beoordelingsschema gemaakt, waar we de belangrijkste eisen voor ons product hebben neergezet. Daarna hebben we elke categorie een weging gegeven op belangrijkheid. Het belangrijkste heeft dus de hoogste weging. Daarna gaven we voor elk concept een cijfer van 1 tot en met 5 hoe goed ze op die eis scoorde. Daarna wordt de score keer de weging gedaan en alles bij elkaar opgeteld. Nu krijgt elk concept een score. Hierdoor krijgen we een beter idee welk idee het beste is.

Concept 2 was een van de eerste ideeën die we hadden bedacht. De bedoeling van concept 2 was om een manier te vinden om de appel heel precies op het midden van het eind oppervlakte te plaatsen een ook het hoogteverschil te over komen.
Het idee van concept 2 is dat door een schaarmechanisme de grijper naar de appel toe gaat. De grijper zou aan de andere kant van de muur starten, dan in schuiven zodat het om de muur heen kan en zo naar de appel toe draaien. Als het bij de appel terecht komt, dan schuift de arm weer uit zodat de grijper de appel op kan pakken. Dan draait de arm op dezelfde manier naar de andere kant van de muur.
Dit was de eerste idee dat we hadden om de appel aan de andere kant van de muur te brengen. Een voordeel van dit idee was dat de arm niet over de muur hoeft, dus de actuator niet zo’n groot moment hoeft uit te oefenen. De arm is ingeschoven, dus korter en het makkelijker is om te draaien. Maar er is veel wrijving met het schaarmechanisme, het is niet makkelijk om te maken, en het is niet heel stevig.
De vingers van de grijper zijn flexibel om de hoogteverschil probleem te voorkomen. De vingers worden dichtgetrokken door draden die aan het actuator vast zitten, maar er is toch een beetje speling in de vingers zodat wanneer de appel op de vlak komt die hoger is, dan kan de arm nog helemaal uitschuiven en de appel neerleggen op de goede plek. Zo wordt het hoogteverschil geen probleem.
Het probleem met deze grijper was dat het is gewoon heel moeilijk is om het te bouwen en om zeker te zijn dat het goed werkt. Ook is het maken van de flexibele vingers heel ingewikkeld en een beetje onrealistisch.

02
Flexibele grijper
Pluspunten:
- Stevig design door de bevestiging aan de muur.
- Hoogteverschil wordt overwonnen door de flexibele grijpvingers.
Minpunten:
- Arm moet verder uitrekken dan de actuator kan bewegen.
-flexibele grijper is moeilijk te maken.
01
Glijbaan
Pluspunten:
- Appel komt precies in het midden
- Origineel idee.
- Geen zijwaartse verplaatsing nodig.
- Hoogteverschil is makkelijk overwonnen.
Minpunten:
- Weinig te maken van perspex.
- Onbetrouwbaar door verschillende maten van appels.
- Ingewikkeld bouw proces.
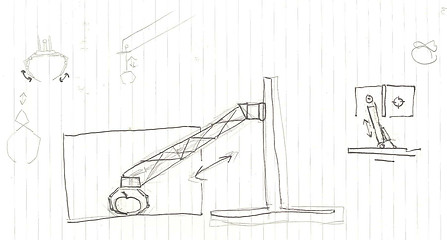
03
300° Grijper
Een van de moeilijkheden van dit project is de verplaatsing van de appel langs of over de muur. Met dit concept wordt dat opgelost door de gehele grijper 300 graden te draaien om een as. Door buiten de plateau’s op dezelfde lijn als het muurtje een staaf te zetten die kan draaien en zo het grijp gedeelte verplaatst worden. De rotatie in de as wordt gecreëerd door een actuator die een touw naar zich toe trekt die om de as heen gewikkeld zit. Zo wordt de as 300 graden met de klok mee gedraaid naar het plateau waar de appel ligt. Vervolgens schuift de actuator van het grijp gedeelte naar binnen waardoor de grijparmen naar zich toe bewegen en de appel klem komt te zitten. Daarna schuift de actuator van de as uit zodat het touw slap komt te hangen. Aan de andere kant van de as zit ook een touw die constant strak staat door een veer die vast zit aan de grond. De kracht van de veer is lager dan de kracht die de actuator kan leveren maar hoog genoeg om de as terug te laten bewegen als de actuator uitgeschoven is. Hierdoor draait alles weer terug naar de oorspronkelijke positie alleen nu met een appel. En als laatste stap schuift de actuator van het grijp gedeelte naar buiten waardoor de appel op de grond komt. Hiernaar draait het geheel weer terug.
Het voordeel van dit concept is dat er vrijwel geen complexiteit zit om de arm van de grijper in te schuiven of iets dergelijks. Ook zou dit concept met 2 actuatoren kunnen. Een extra actuator komt goed van pas als we later in de problemen zouden komen. Het nadeel van dit concept is de stevigheid bij de as. Hier wordt namelijk veel gewicht en moment op gezet. De as moet ook nog kunnen draaien en is best een cruciaal gedeelte. Het geheel komt misschien ook niet het plateau op.


Concepten
Beoordelingsschema
Uit het morfologisch schema hebben we de 3 beste concepten gekozen en verder uitgewerkt. Hier zullen we meer uitleggen geven over die concepten.

Ons eerste concept is ontstaan tijdens een moment waarop we met ons zevenen zaten te brainstormen over wat voor een ideeën we allemaal hadden over hoe we de verschillende onderdelen van onze grijper wilden gaan ontwerpen. Het begon als een half grappend idee, maar toen we er even over nadachten dachten we dat het wel een interessant, en zeker origineel, idee zou kunnen zijn om iets verder uit te werken.
Het idee is dat we aan een halfronde pijp aan de opstelling zouden bevestigen, die door middel van een actuator zich in positie laat zakken. Aan het begin van de ‘glijbaan’ bevindt zich een kleine grijper die de appel in de pijp zou leggen, waardoor hij naar het einde rolt, waar een plaat hangt met een spons om de appel weer tegen te houden zodat deze precies in het midden van het kruis tot stilstand komt. Waarna de actuator, die aan de muur bevestigd is, het geheel weer uit de buurt van de ‘drop-zone’ haalt.
Het leek een goed plan wat best zou kunnen werken en ook zeker een paar voordelen heeft. De appel zou precies in het midden kunnen komen en het hoogteverschil zou verholpen zijn en we zouden geen moeilijk zijwaartse verplaatsing moeten gebruiken. Maar toen we kritischer naar dit specifieke ontwerp keken, bleken er toch wel een aantal mankementen aan te zitten. Ten eerste is de hele glijbaan met grijper wel een heel erg groot gevaarte om aan de muur te hangen, dit zou voor te veel kracht op de bevestigingspunten zorgen. Daarnaast is het te betwijfelen of een appel wel zo goed rolt, gezien de onregelmatige vorm die hij heeft, en wanneer de appel dan toch naar het eind gerold is, is het zeer onwaarschijnlijk dat hij precies recht op weer terecht komt. En wanneer dan de glijbaan uit de weg getrokken is, kan het zijn dat de appel nog net even omvalt en buiten de vastgestelde marge terecht komt.
Het was zeker een bijzonder idee en leuk om even over na te denken, maar er zaten te veel haken en ogen aan dit concept, waardoor we uiteindelijk niet voor de glijbaan gekozen hebben.

Pluspunten:
- Arm hoeft niet worden ingeschreven.
- Kan met 2 actuatoren.
Minpunten:
- Veel krachten op de as.
- De as laten draaien is best ingewikkeld.
- Hoogteverschil is een probleem.
Terugkoppeling
Natuurlijk wanneer je met een nieuwe groep mensen je eerste project aan gaat stuit je later op fouten die je in het proces bent begaan, of gewoon wat dingetjes die de volgende keer beter kunnen. Nu is het erg belangrijk om deze punten vast te leggen tijdens en bij de evaluatie van het project. Zo kan namelijk het ontwerpproces en het teamwork de volgende keer alleen maar beter verlopen. Ondanks dat wij van mening zijn dat we tijdens dit ontwerpproces aardig goed te werk zijn gegaan, zijn we toch op een aantal hekelpunten gestuit. Allereerst hebben wij na de het kiezen van ons definitieve ontwerp, dat we vervolgens uit gingen werken, niet goed onze gehele grijper van tevoren duidelijk gemaakt. Het was duidelijk wat er per onderdeel zou moeten gebeuren, maar de grijper als geheel hebben we niet goed meegenomen in het ontwerpproces. Zo erg is dit natuurlijk ook nog niet, maar zo kom je later wel achter dingen die je nog moet oplossen omdat we niet goed hebben gekeken hoe de verschillende onderwerpen op elkaar aansluiten. Dit hadden we natuurlijk kunnen voorkomen door van tevoren al na te gaan wat er mis kan gaan bij het aansluiten van de verschillende losse onderdelen. Nu moesten we dit tijdens het maken van de grijper doen en dit kost natuurlijk meer tijd en stress.
Een ander verbeterpunt is het maken van berekeningen bij de wat ingewikkeldere bewegingen en krachtenwerkingen. Omdat wij deze periode daar nog niet toe in staat waren konden wij dit natuurlijk nog niet doen. Het is echter wel een punt om in het achterhoofd te houden voor ontwerpen die later nog kan maken. Het uiteindelijke ontwerpen van een project wordt namelijk een stuk betrouwbaarder wanneer er van tevoren is berekend of het überhaupt wel mogelijk is wat je wil. Qua samenwerking zijn we het er allemaal over eens dat die behoorlijk goed liep voor een eerste keer. Dit is dan wel geen verbeter punt maar wel een punt om ook in je achterhoofd te houden bij het werken met andere groepen.
